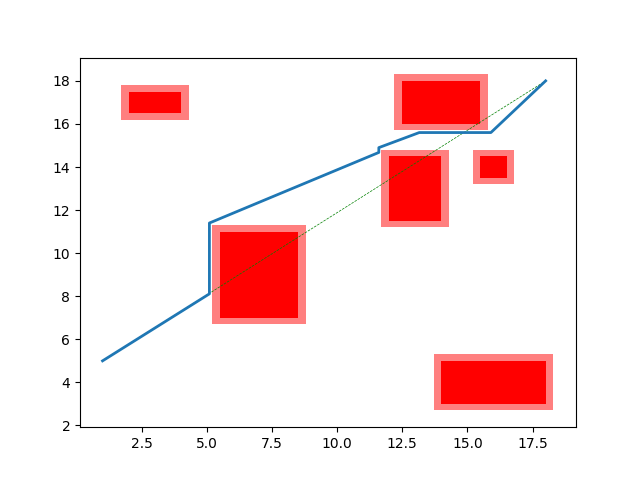
Path Planning
As a part of a student group in METU IEEE RAS, we participated in national Swarm UAV competition. I mainly worked on path planning part of the project. I researched in general for path planning and implemented a viable path planning algorithm for our case. This implementation can be found in this repo.