Long Thin Hauler - Capstone Design Project
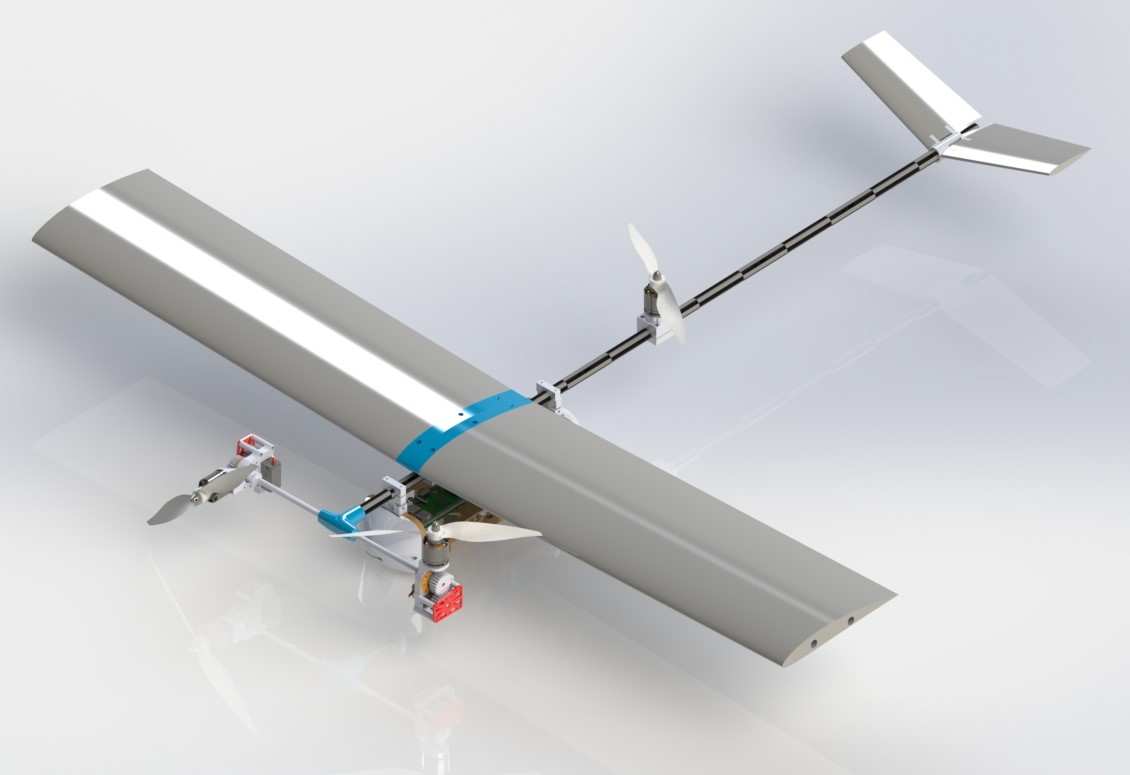
As a part of METU EEE Capstone Design Project, worked on the visual inertial navigation, system design, 3D CAD and mechanical design of an autonomous long-haul vehicle. The project focused on developing solutions for autonomous localization, parking spot detection, and accurate parking for heavy-load transportation vehicles.